

What is CAN bus error
CAN bus error can be caused by several reasons. CAN Frame error, faulty cable, noise, malfunction of each nodes, … SO identify and classfy these errors are key to ensuring performance of the overall CAN system.
How does CAN error handling work?
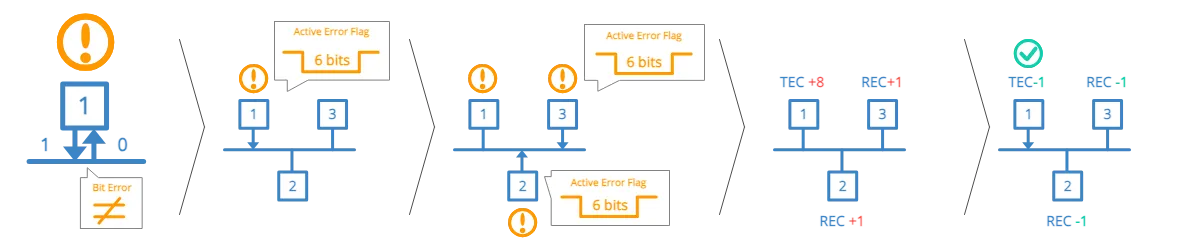
1. CAN node 1 transmits a message onto the CAN bus - and reads every bit it sends
2. In doing so, it discovers that one bit that was sent dominant was read recessive
3. This is a 'Bit Error' and node 1 raises an Active Error Flag to inform other nodes
4. In practice, this means that node 1 sends a sequence of 6 dominant bits onto the bus
5. In turn, the 6 dominant bits are seen as a 'Bit Stuffing Error' by other nodes
6. In response, nodes 2 and 3 simultaneously raise an Active Error Flag
7. This sequence of raised error flags comprise part of a 'CAN error frame'
8. CAN node 1, the transmitter, increases its 'Transmit Error Counter' (TEC) by 8
9. CAN nodes 2 and 3 increase their 'Receive Error Counter' (REC) by 1
10. CAN node 1 automatically re-transmits the message - and now succeeds
11. As a result, node 1 reduces its TEC by 1 and nodes 2 and 3 reduce their REC by 1