0. Outline
# Installation Environment
[OS] Window 10 21H2
[HW] Macbook Pro 2019, 16inch
Plain Text
복사
# Installation Goal
[OS] Ubuntu 22.04
[VM] VMware Workspace 17 Player
[GL] ROS2
Plain Text
복사
1. VMware Installation & Setting


VMWare 설치는 위 사이트의 1. VMware Installation & Setting을 참고해주세요
2. Ubuntu 22.04 Install

ROS2은 Ubuntu 22.04에 호환됩니다.


위의 사이트에 접속하여 ubuntu 22.04의 이미지 파일(.iso)을 다운받아주세요. 용량이 3.6GB라 시간이 꽤 소요될 수 있습니다.입니다..! 시간이 걸릴 수 있습니다.
본격적으로 설치하겠습니다. Create a New Virtual Machine을 진행해주세요.
[1] VMware
설치 세팅입니다!
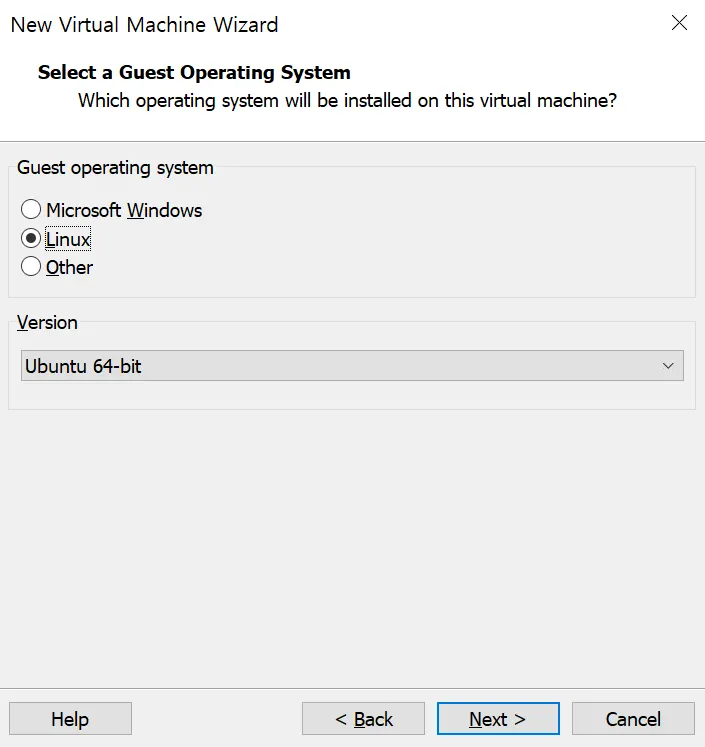
첫 화면에서 I will install the operating system later.를 선택하세요.
두 번째 화면에서는 Linux 및 Ubuntu 64-bit을 선택하세요.
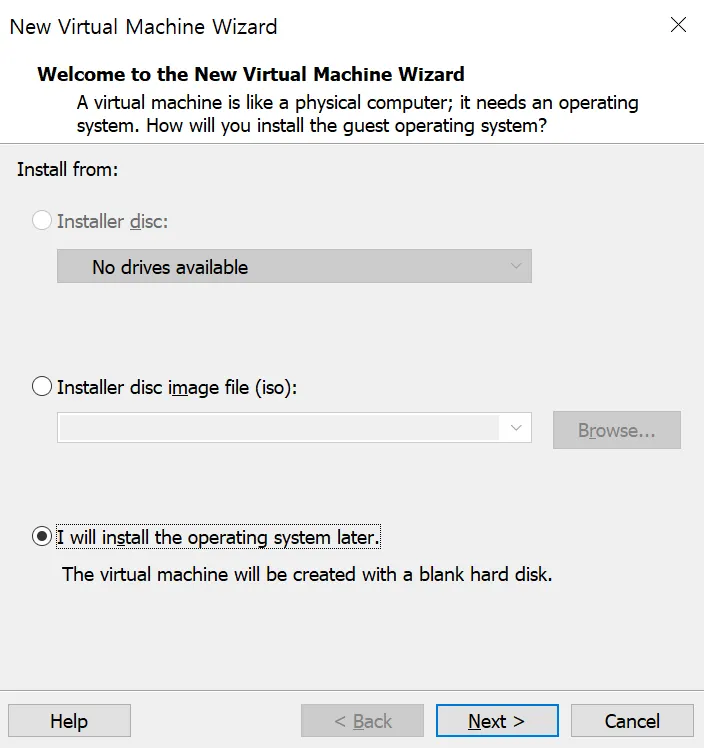
[2-1] VM Wizard Installation Setting
[2-2] VM Wizard Installation Setting
[2-3] VM Wizard Installation Setting
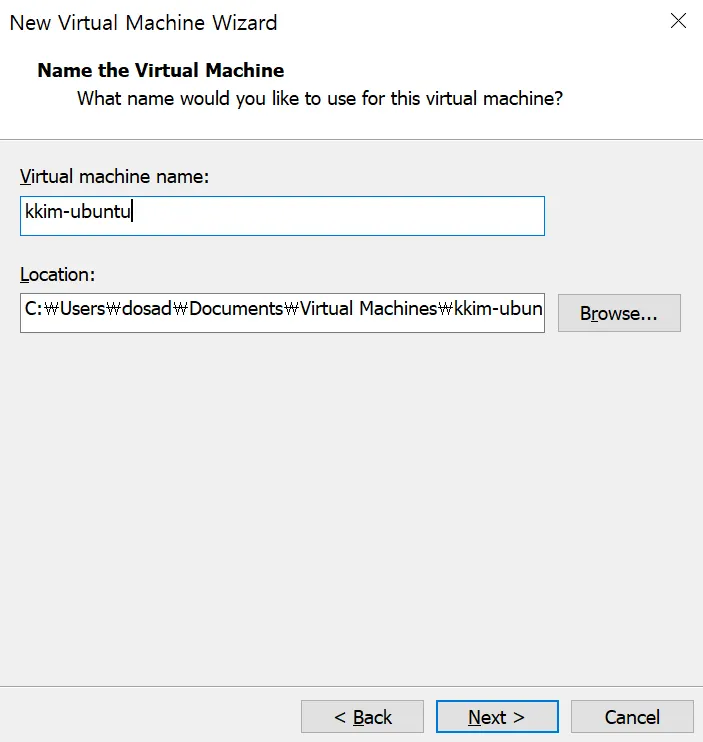
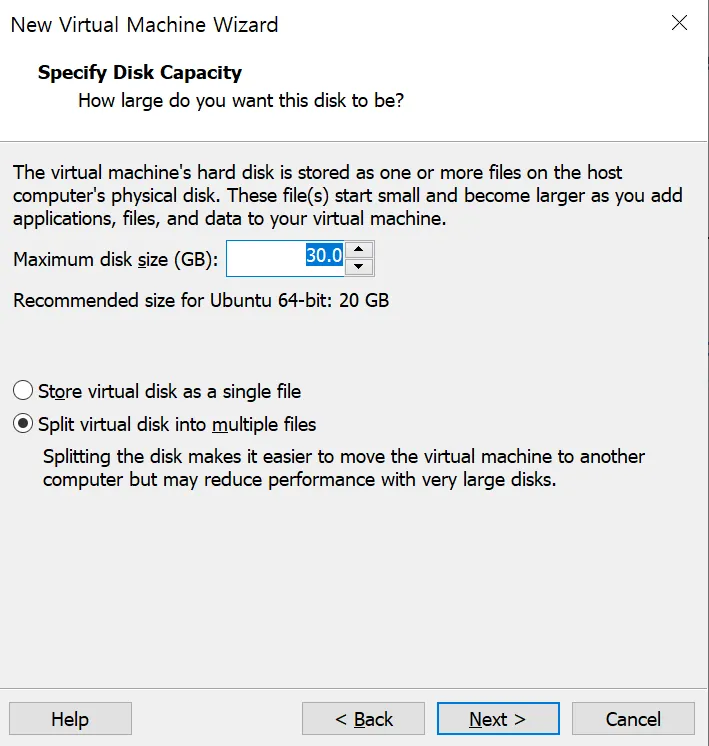
가상 머신 이름 입력하시고, 용량 세팅 진행해주세요. 저는 30GB로 했습니다!
[2-4] VM Wizard Installation Setting
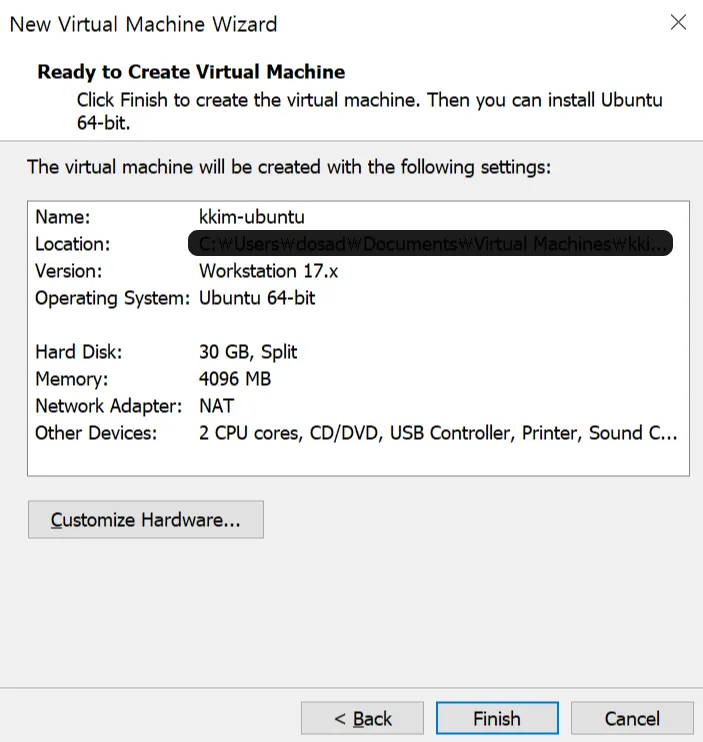
[2-5] VM Wizard Installation Finish
이후 Edit virtual machine settings을 선택하고 CD/DVD에 다운받은 .iso를 입력시킵니다.
[3-1] iso file input
.png&blockId=a780663e-70c1-41d4-b5b8-a42b927d88f0)
[3-2]
[4-1]
[4-2]
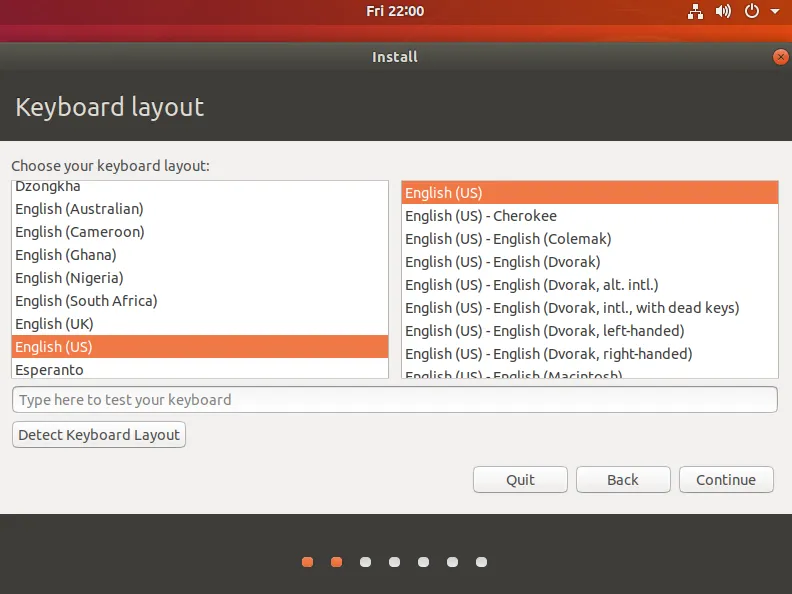
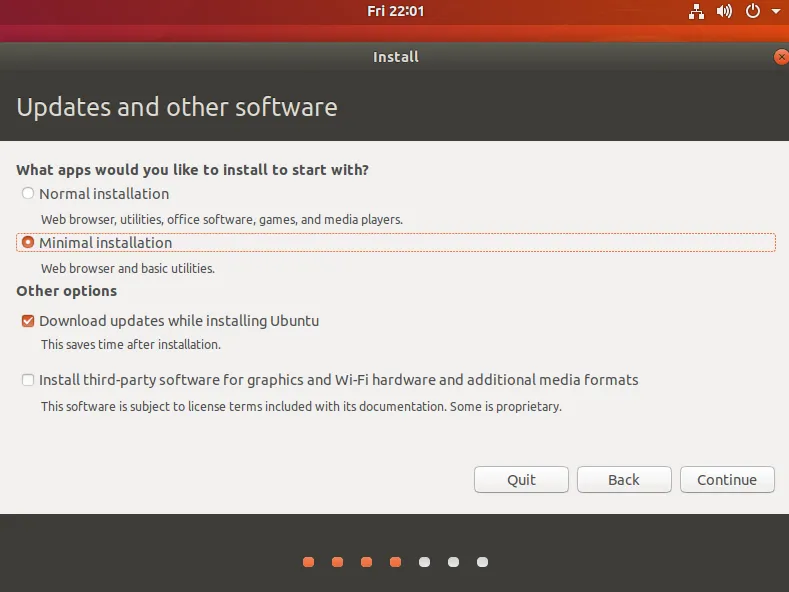
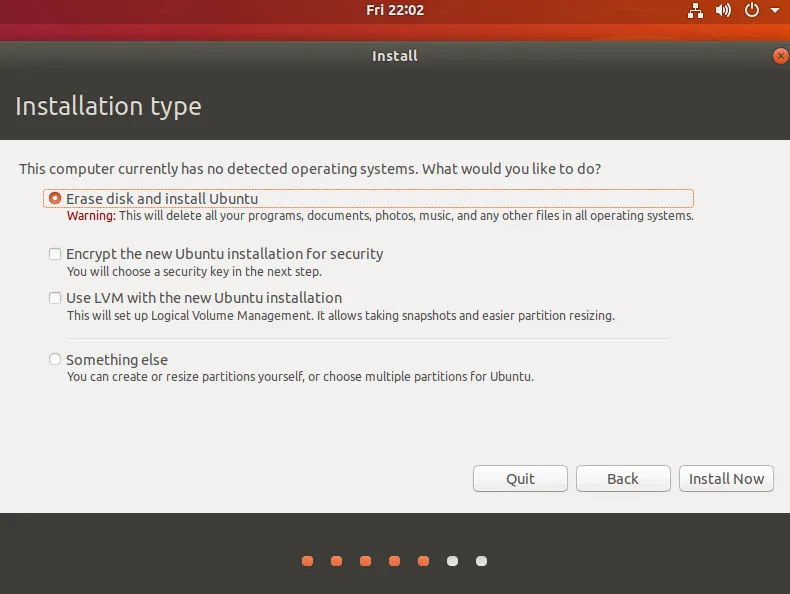
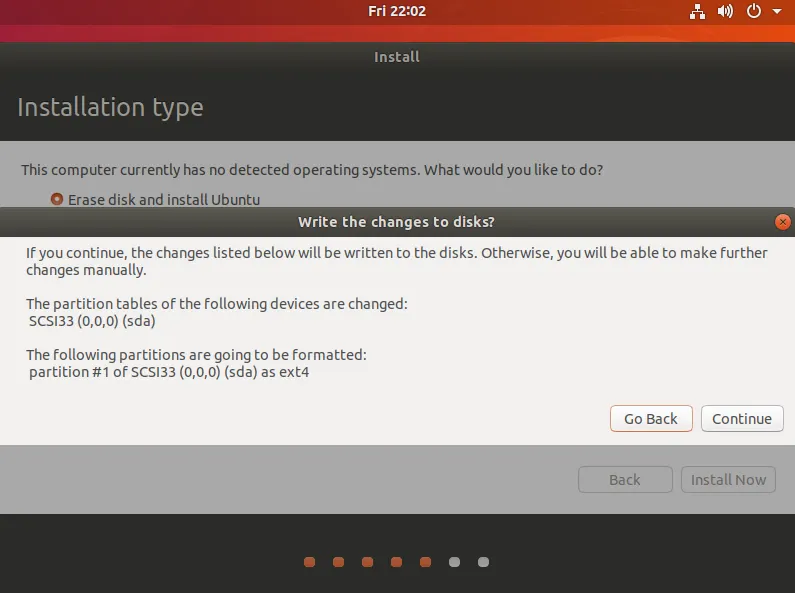
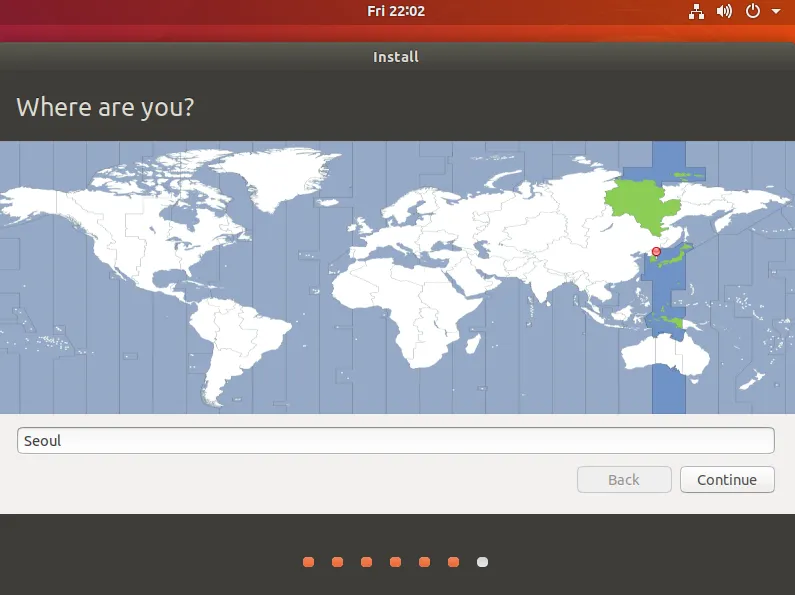
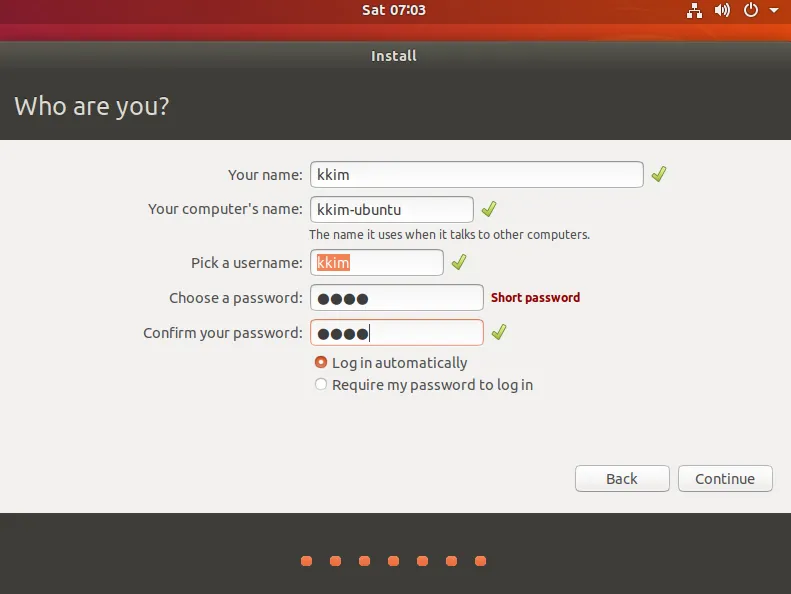
이후 평범하게 우분투를 설치하시면 됩니다. 저는 Minimum version setting과 id/password 외에는 따로 설정한 부분이 없습니다. 설치 완료 후 재시작 안내 메시지가 뜹니다!
밑의 instruction은 ubuntu 18.04 용이지만 거의 비슷합니다. 이대로 진행하셔 무방하실 듯 하네요
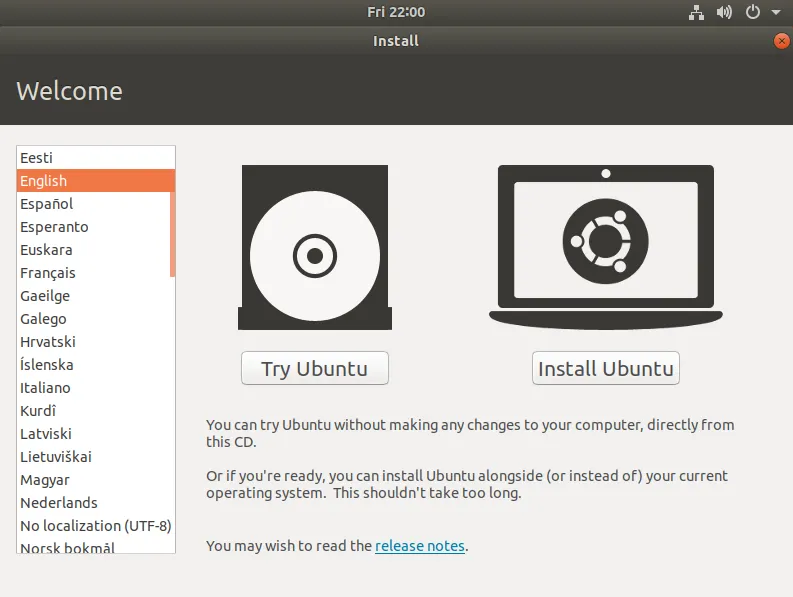
[5-1] Install Ubuntu
[5-2] Install Ubuntu
[5-3] Install Ubuntu
[5-4] Install Ubuntu
[5-5] Install Ubuntu
[5-6] Install Ubuntu
[5-7] Install Ubuntu
[5-8] Install Ubuntu
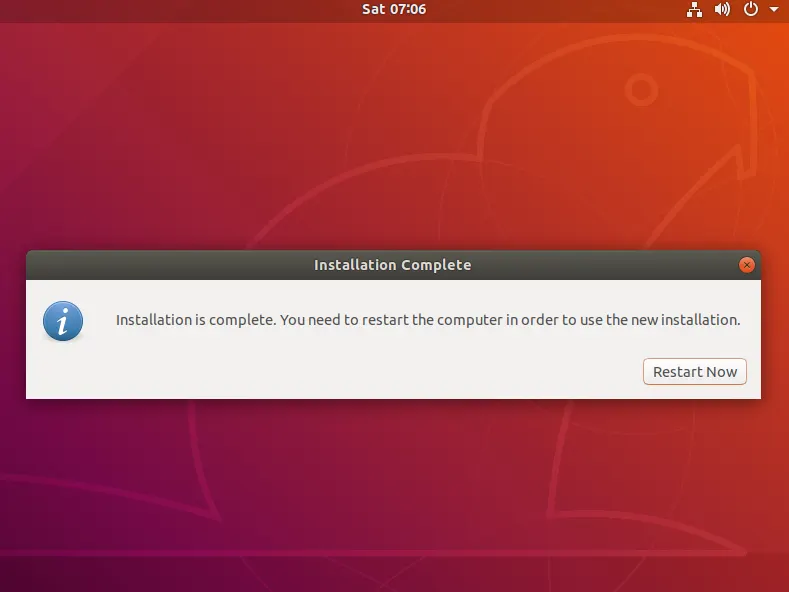
[5-9] Restart Ubuntu
3. ROS2 설치 - setting
3.0. oh-my-zsh
편한 작업을 위해 oh-my-zsh를 설치했습니다.
링크를 참조해서 설치해보세요!

3.1. 키 설정
sudo apt update && sudo apt install locales
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
Shell
복사
3.2. Locale 설정
sudo apt install curl
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
Shell
복사
3.3. Source 설정, 저장소 활성화
apt-cache policy | grep universe
# result
500 http://security.ubuntu.com/ubuntu jammy-security/universe i386 Packages
release v=22.04,o=Ubuntu,a=jammy-security,n=jammy,l=Ubuntu,c=universe,b=i386
500 http://security.ubuntu.com/ubuntu jammy-security/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy-security,n=jammy,l=Ubuntu,c=universe,b=amd64
100 http://kr.archive.ubuntu.com/ubuntu jammy-backports/universe i386 Packages
release v=22.04,o=Ubuntu,a=jammy-backports,n=jammy,l=Ubuntu,c=universe,b=i386
100 http://kr.archive.ubuntu.com/ubuntu jammy-backports/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy-backports,n=jammy,l=Ubuntu,c=universe,b=amd64
500 http://kr.archive.ubuntu.com/ubuntu jammy-updates/universe i386 Packages
release v=22.04,o=Ubuntu,a=jammy-updates,n=jammy,l=Ubuntu,c=universe,b=i386
500 http://kr.archive.ubuntu.com/ubuntu jammy-updates/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy-updates,n=jammy,l=Ubuntu,c=universe,b=amd64
500 http://kr.archive.ubuntu.com/ubuntu jammy/universe i386 Packages
release v=22.04,o=Ubuntu,a=jammy,n=jammy,l=Ubuntu,c=universe,b=i386
500 http://kr.archive.ubuntu.com/ubuntu jammy/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy,n=jammy,l=Ubuntu,c=universe,b=amd64
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
Shell
복사
# source list에 저장소 추가
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
Shell
복사
4. ROS2 설치
sudo apt update && sudo apt upgrade
sudo apt install ros-humble-desktop
sudo apt install ros-humble-ros-base
Shell
복사
3가지 명령어를 실행하면 ROS2가 정상적으로 설치됩니다.
이제 Talker - Listender 예제를 통해 정상적으로 작동하는지 확인해보겠습니다.
먼저 ros2 명령어를 사용하기 위해 다음 코드를 입력합니다.
# bash
source /opt/ros/humble/setup.bash
# zsh
source /opt/ros/humble/setup.zsh
Shell
복사
위의 코드를 ~/.bashrc나 ~/.zshrc 등에 입력하면 매번 입력할 필요가 없어 편리합니다.
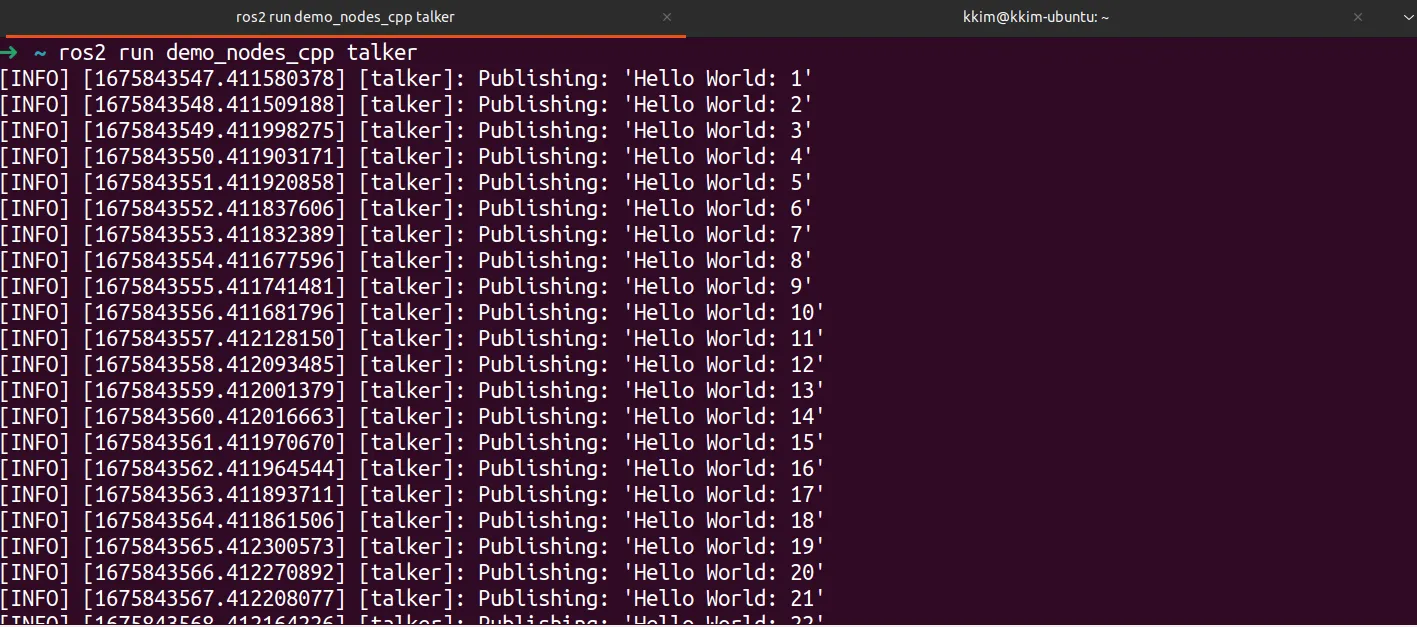
첫 번째 터미널을 열어 다음 코드를 실행합니다.
ros2 run demo_nodes_cpp talker
Shell
복사
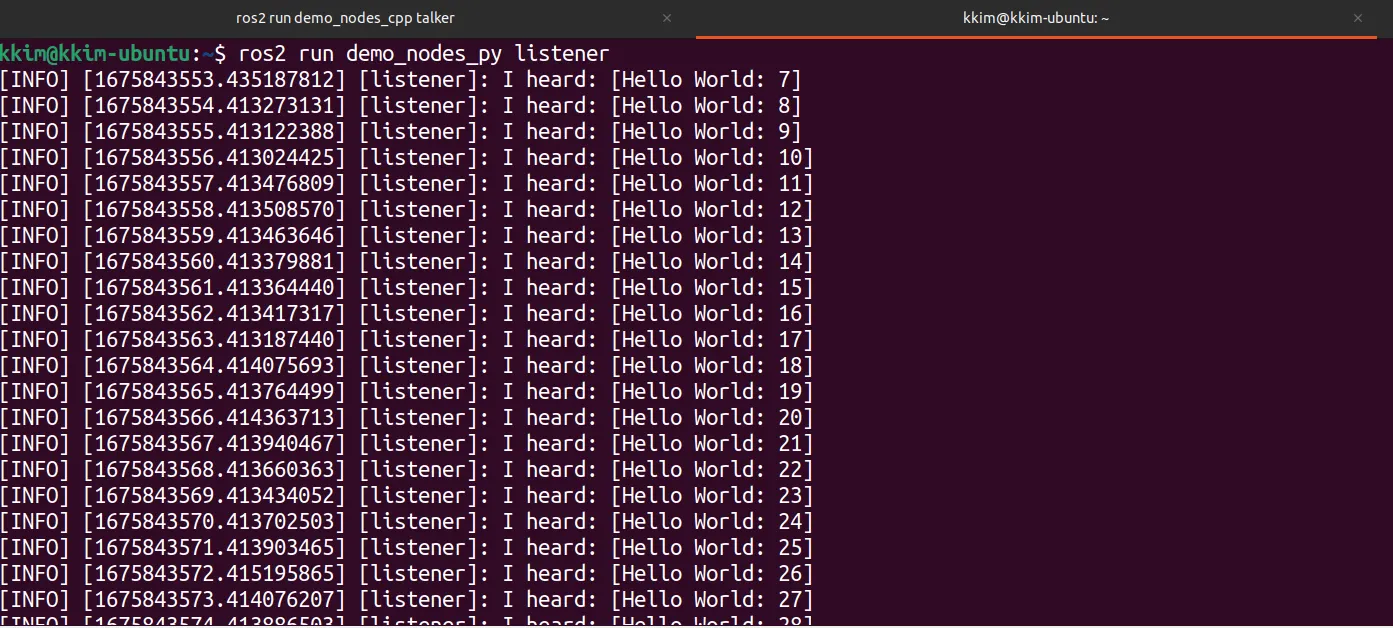
두 번째 터미널을 열어 다음 코드를 실행합니다.
ros2 run demo_nodes_py listener
Shell
복사
왼쪽이 talker, 오른쪽이 listner입니다.